Roel Merry (29) is in januari 2006 met zijn promotieproject begonnen en gisteren (woensdag 25 november) gepromoveerd; ruim binnen de gestelde vier jaar dus. Dat is des te opmerkelijker omdat de werktuigbouwkundige ook nog eens tweemaal drie maanden fulltime bezig was als teamleider van Tech United, het robotvoetbalteam van de TU/e, dat Europees kampioen werd in 2008 en de afgelopen twee jaar de finale haalde bij de wereldkampioenschappen.
Van zijn bemoeienis met het robotvoetbal heeft hij vooral leren organiseren en samenwerken, zegt Merry: “Inhoudelijk sloot mijn werk voor Tech United niet direct aan bij mijn promotie, al maken we ook voor de voetbalrobots natuurlijk veel gebruik van regeltechniek.” En dat is waarmee de robotcoach zich voor zijn promotieproject in de groep Systems and Control (onder leiding van prof.dr.ir. Maarten Steinbuch) heeft beziggehouden.
Merry ontwikkelde namelijk regelsystemen voor precisietoepassingen, zoals het positioneren van samples onder zogeheten ‘scanning’ microscopen (zoals de Atomic Force Microscope, AFM). “Bij Tech United zijn we al blij als we op tien centimeter weten waar de Turtles (de voetbalrobots - red.) zich op het speelveld bevinden, maar met een AFM wil je een oppervlak met een nauwkeurigheid van een nanometer kunnen aftasten. Dan moet je dus ook de samples met die precisie kunnen positioneren.”
Een instrument hiervoor is de piëzo-motor. Piëzokristal is een materiaal dat in een bepaalde richting krimpt of juist uitzet, afhankelijk van de elektrische spanning die erover wordt gezet. Piëzo’s zitten onder meer in gasaanstekers (hierin wordt het omgekeerde effect gebruikt; samendrukken van het kristal veroorzaakt een vonkje), maar ze worden volgens Merry ook veel gebruikt voor precisietoepassingen: “Ze zijn nauwkeurig en ze werken zeer reproduceerbaar. Wij hebben onderzocht hoe je de aansturing van deze piëzo’s kunt verbeteren.”
Veel piëzo-motoren hebben een zogeheten korte slag: ze kunnen slechts binnen zeer beperkt bereik bewegen. Voor een aantal toepassingen is dat ontoereikend. Daarom is ook een wandelende variant ontwikkeld, al is wandelen een misleidende term: het is eerder een soort mestkever, maar dan met vier pootjes, die op zijn rug liggend een slede op zijn pootjes balanceert en deze in de gewenste richting duwt (zie afbeelding). De pootjes zijn gemaakt van piëzo-materiaal en worden aangestuurd met een wisselspanning, zodat ze repeterende, ellipsvormige bewegingen maken.
Veel wandelende piëzo-motoren worden aangestuurd met een hoogfrequent signaal, waardoor de pootjes duizenden stapjes per seconde zetten. Lekker snel, maar ongeschikt voor precisietoepassingen waarbij juist lage snelheden gewenst zijn, zegt Merry. “Daarvoor wil je juist een langzame, vloeiende en extreem gecontroleerde beweging.” Hij ging daarom aan de slag met een geavanceerdere ‘kever’. Hierin bestaan de pootjes uit twee delen (kuit- en scheenbeen, zou je kunnen zeggen) die afzonderlijk van een elektrische spanning worden voorzien. Hierdoor zet de ene kant van de poot sterker uit dan de ander en buigt het geheel zich. “Het principe is hetzelfde als bij het bimetaal dat je bijvoorbeeld in de thermostaat vindt”, legt de onderzoeker uit. Hierin zit een strip met twee soorten metaal. “Onder invloed van de temperatuur zet het ene metaal sneller uit dan het andere, waardoor de strip buigt.”
Merry laat een filmpje zien van de beweging die de piëzo-motor maakt. “Kijk”, zegt hij, “de pootjes worden in twee paren aangestuurd, waardoor ze een soort galopperende beweging maken. Als je ze met een eenvoudig sinusvormig signaal aanstuurt, zie je dat de bovenliggende slede beurtelings door beide paren pootjes wordt gedragen. Bij het overpakken staat de slede echter even stil, terwijl je juist wilt dat die een mooie, vloeiende beweging maakt.” De beweging wordt al een stuk vloeiender als de pootjes worden aangestuurd met een asymmetrisch signaal, zodat ze na het loslaten sneller terug zijn om opnieuw over te pakken.
Toch ben je er dan nog niet; in de praktijk zijn de pootjes niet allemaal hetzelfde, wat betekent dat er in Merry’s woorden nogal ‘exotische’ spanningen nodig zijn om de slede echt gelijkmatig te laten bewegen. Daar komt nog bij dat elk van de piëzo-motoren zijn unieke eigenschappen heeft. Merry bedacht daarom een aantal tests waarmee de bewegingseigenschappen van elk ‘kevertje’ worden vastgelegd, resulterend in een speciaal voor die piëzo-motor ontworpen elektrische aansturing.
Als je eenmaal voldoende van het bewegingspatroon van de motortjes snapt, kun je ook een zelflerend systeem maken om de motor zelfstandig te leren lopen, door de beweging van de slede te meten en die informatie terug te koppelen. De aansturing is een repeterend proces; als je ziet wat er in de ene stap fout gaat, kun je dat in de volgende compenseren. “Die feedback kun je ook gebruiken om storende, repeterende invloeden van de omgeving te compenseren, zoals trillingen van machines die in de buurt staan.”
Als gevolg van Merry’s inspanningen zijn de afwijkingen in de beweging van de wandelende piëzo-motor met vijfennegentig procent afgenomen. Reden voor tevredenheid bij de kevertjestrainer: “Als je de fouten met een factor twintig weet terug te brengen, doe je het aardig, toch?” (TJ)/.
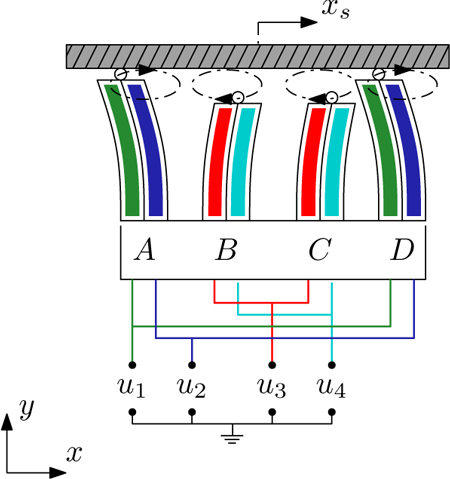
De wandelende piëzo-motor: elk van de pootjes wordt met twee verschillende spanningen aangestuurd, waardoor ze buigen en met hun bewegingen de bovenliggende slede voortduwen.
|







)